Specialized knowledge and experience in self-driving car technologies is crucial to building successful autonomous vehicles. As a graduate of Udacity’s highly selective Self-Driving Car Nanodegree, I’ve completed numerous studies and projects which provide me with the skills to build safe, efficient, and comfortable self-driving car software platforms.
All of my completed projects, including full source code, are available for viewing and cloning on my Github account. Please click through any project to learn more about my work!
Perception – Detection using Computer Vision and Deep Learning
Detection systems estimate the state of the surrounding environment including landmarks, vehicles, pedestrians, and other objects.
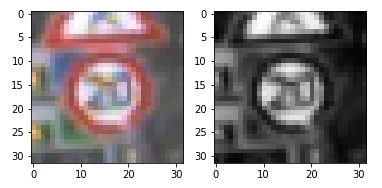
- Convolutional Neural Networks for object classification (such as traffic signs)
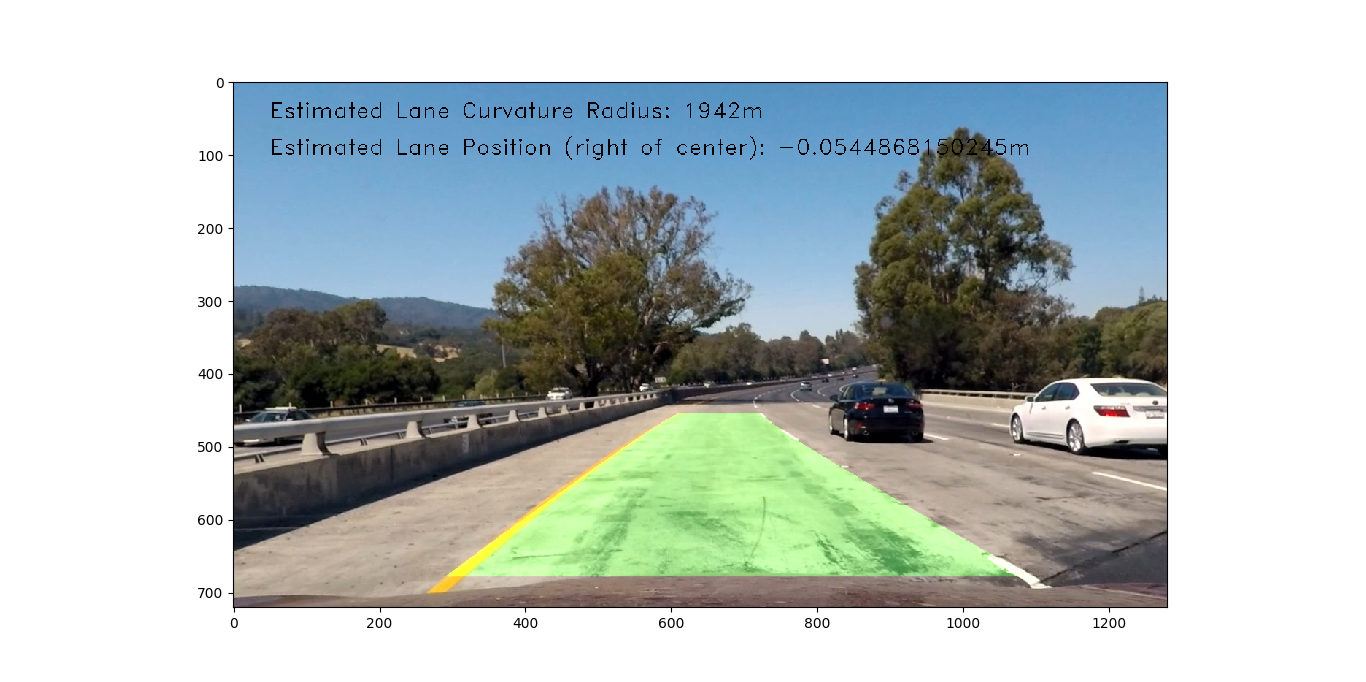
- Advanced image processing techniques for lane line finding
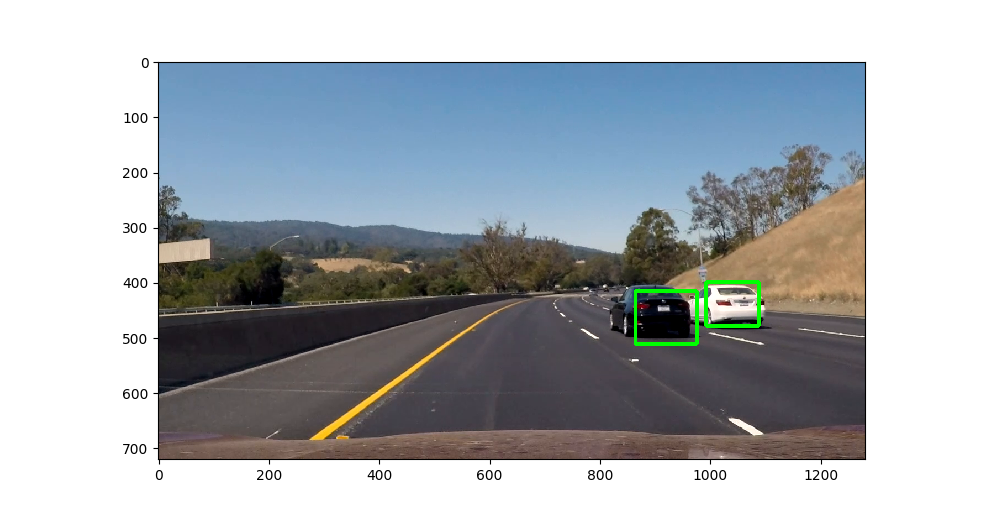
- Advanced image processing and convolutional neural networks for vehicle detection and tracking
- Behavioral Cloning to learn to steer a car only by watching existing drivers

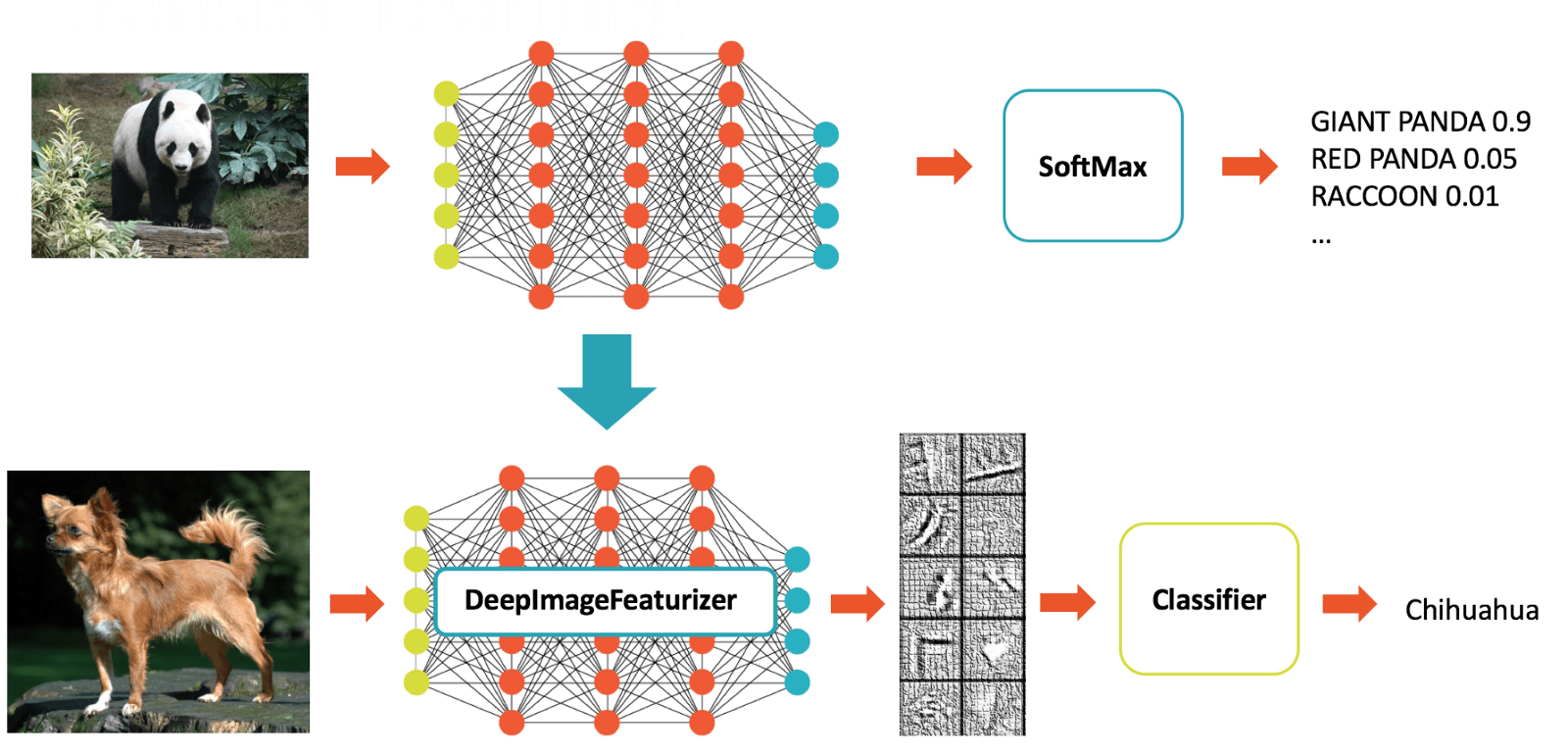
- Transfer Learning to adapt cutting-edge deep learning research for self-driving car applications
- Semantic Segmentation to facilitate scene understanding through high-performance identification of image regions

- Extended Kalman Filters and Unscented Kalman Filters for object tracking and vehicle localization
![]()
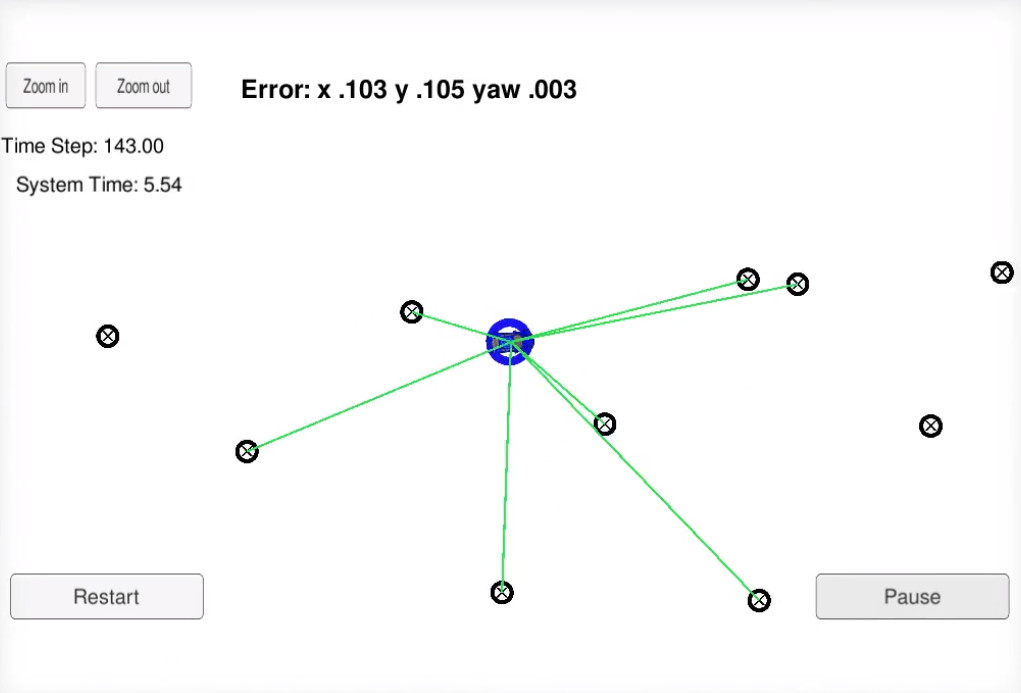
Perception – Localization
Localization systems compare the model of the environment to a known map, to understand where the vehicle is.
- Particle Filters for vehicle localization
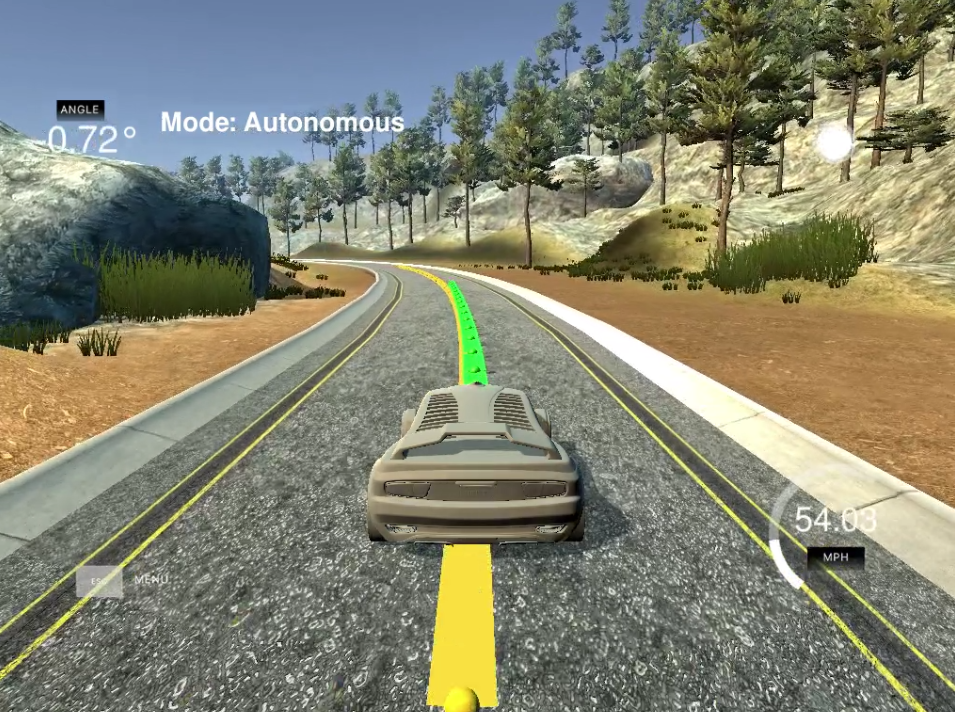
Path Planning
Path planning systems chart a trajectory for the vehicle, using the environmental model, the map, and vehicle location.
- Path Planning for determining valid, safe, optimal, and comfortable routing for vehicles to a destination
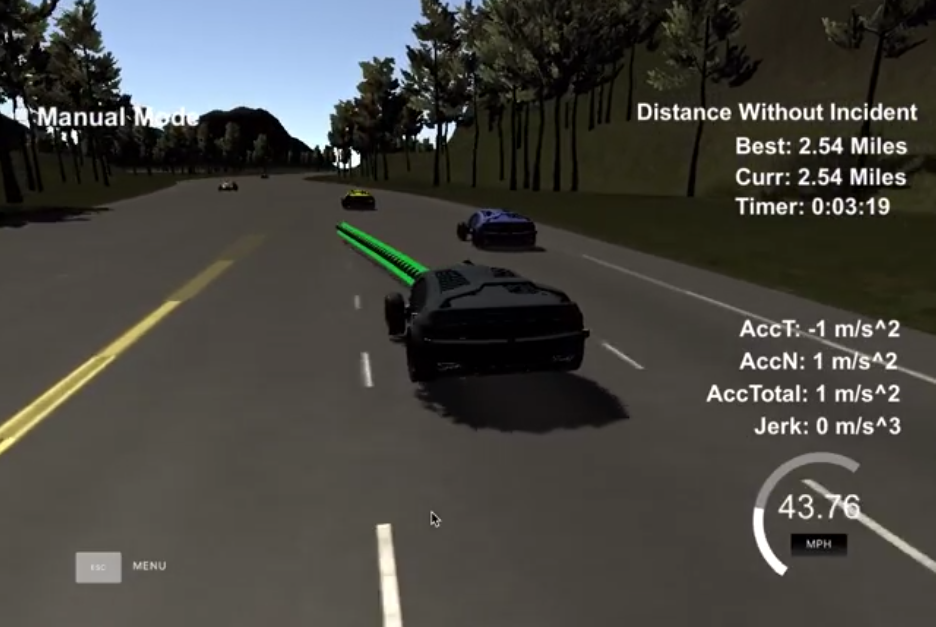
Control Systems
Control systems apply actuators in vehicle hardware to follow the trajectory created the the path planner.
- PID Control for basic control of steering, throttle, braking, and other systems

- Model Predictive Control for advanced control when optimizing across speed, comfort, location, etc
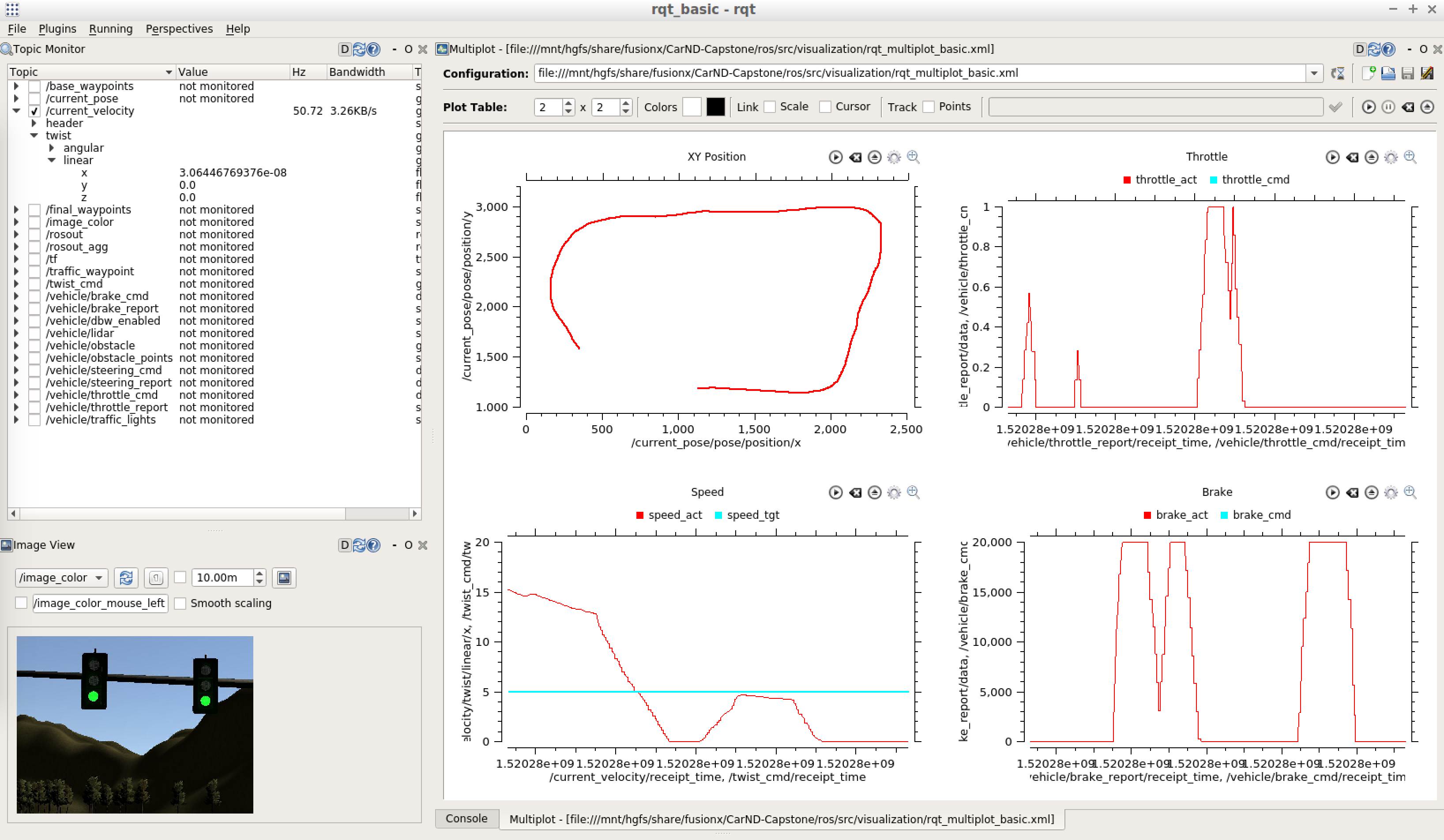
System Integration
- System Integration for putting all of these techniques together in a real life Lincoln MKZ