This is the eleventh post in a series about Reducing Gun Violence in the United States. The previous post described Waiting Periods and Red Flag Laws.
Up to this point, we’ve explored quite a bit about who can purchase guns, how to purchase them, and what restrictions exist. In this post, I’ll explore different types of civilian gun carrying in public, how that carrying has changed over time, what laws enable it, and what effects civilian gun carrying have on firearm violence.
- For those who want to see the highlights without going through the data, skip right to the conclusions at the bottom of this post.
- The data in this post comes from several different sources, which I’ve linked in the references section at the bottom of this post for those who want to see the data for themselves or dive deeper.
Civilian Gun Carrying

Two primary forms of public gun carrying exist:
- Open carry, in which one can generally see the gun someone is carrying; for example:
- A handgun openly strapped to a belt
- A rifle slung on someone’s back
- Concealed carry, in which the gun is concealed from view; for example:
- In a purse
- In a holster underneath clothing
Open Carry
No broad federal laws exist that regulate open carry of firearms. Most states allow open carry of either handguns, long guns, or both. Some states require a permit for open carry, but most do not. Some states also limit where firearms can be openly carried; for example, restricting open carry of guns in religious buildings or college campuses.
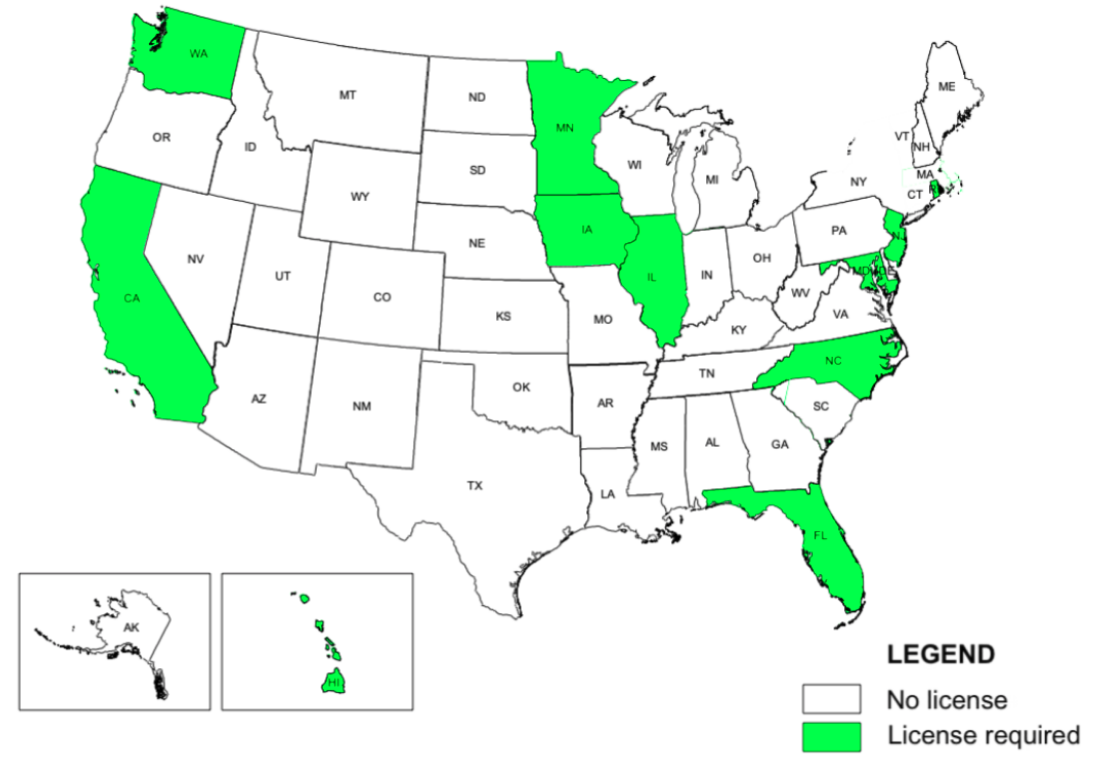
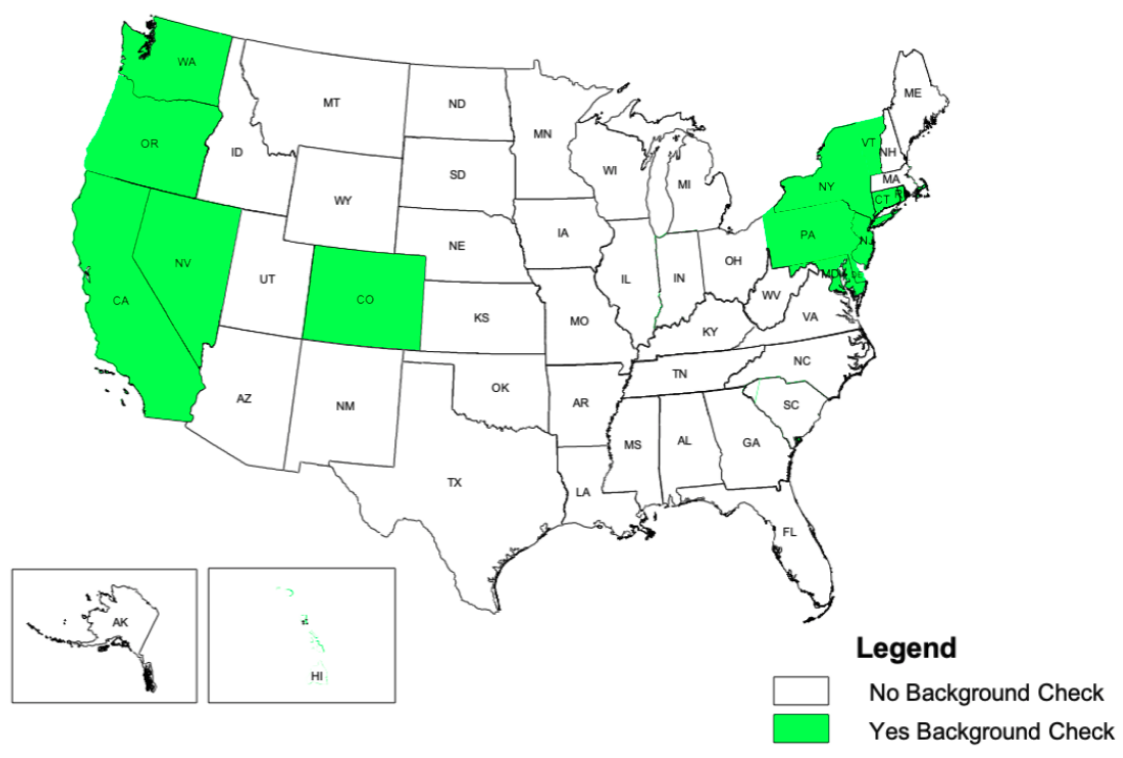
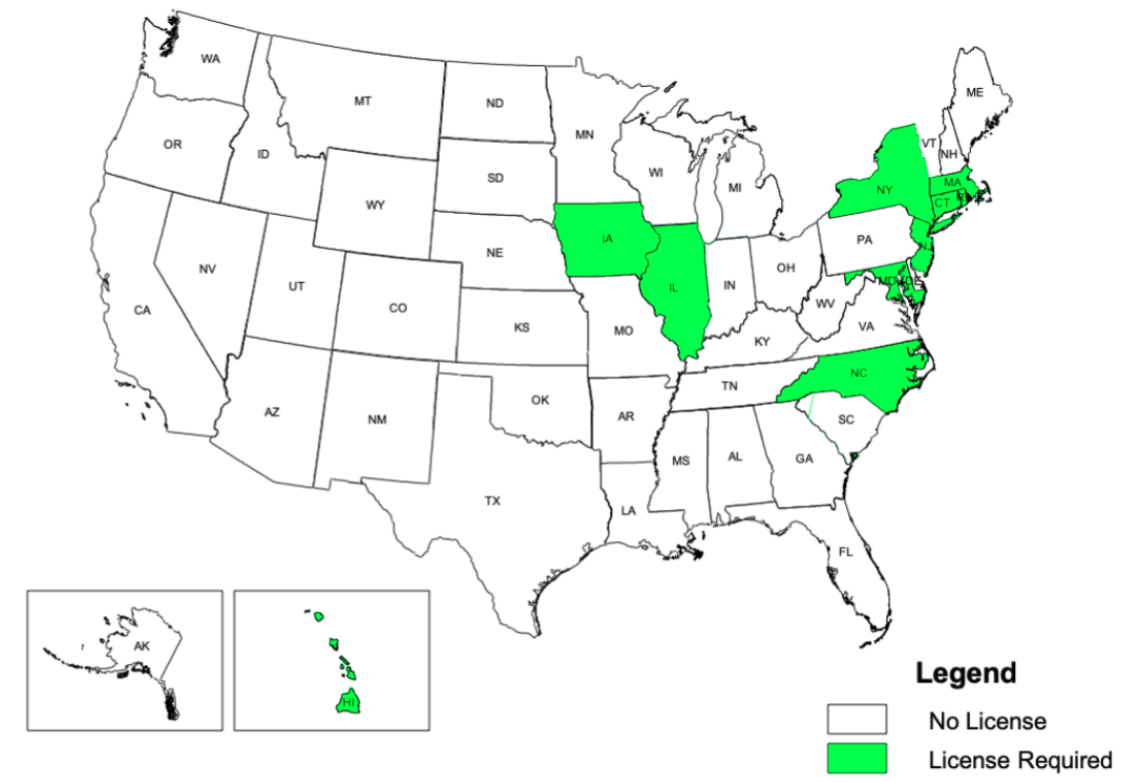
Concealed Carry
Similar to open carry, no broad federal laws exist that regulate concealed carry of firearms. Unlike open carry, every state allows concealed carry in some form. Most states require some type of permit or license for concealed carry. These permits often exempt the permit holder from a federal background check when purchasing a firearm, and also often offer reciprocity between states (a permit in one state may be valid in another without any other action from the permit holder). Some states recognize all concealed carry permits from other states, while others only recognize a select group of other states’ permits (or none at all).
Concealed carry laws fall into three groups:
- May issue
- Shall issue (aka “Right to Carry”)
- Permitless (aka “Right to Carry”)
May issue laws are the most strict. They include baseline requirements for carrying a concealed gun in public, such as having no felony convictions or age restrictions. In addition, even if those requirements are met, the state is not obligated to issue a permit – they might deny issuing a permit based on some likelihood that the permit holder might hurt themselves or others. This is generally called “permit discretion”.
Shall issue laws are less strict. They include similar kinds of baseline requirements as may issue laws, but unlike may issue laws, if a permit applicant meets the requirements, a permit will be issued. The state does not have discretion.
Permitless laws are the least strict. As long as you are legally allowed to own a firearm, then permitless laws allow you to carry it concealed in public with no extra permit or license.
Shall issue and permitless laws are often referred to together as “Right to Carry” laws, which we’ll explore in more depth later in this post.
As of July 2019:
- eight states have may issue laws
- 29 states have shall issue laws
- 13 states have permitless laws
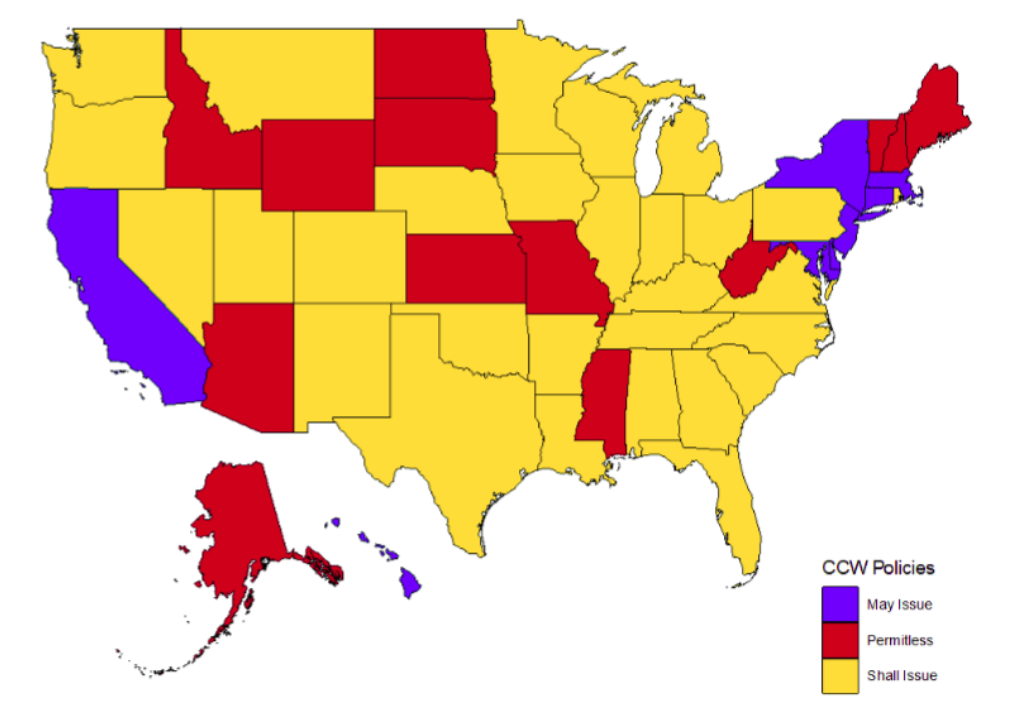
As seen above, most of the country falls into the shall issue law group, with 84% of states being “Right to Carry” states (42 of them).
Differences in Concealed Carry
Concealed carry laws vary significantly in their implementation and requirements, for example, in:
- what entity issues the permit (the state / the county / localities / courts)
- how long the permit lasts
- if college campus carry is allowed
- state residency requirements
- age requirements (18 / 21 / other)
- “good cause” requirements (dangerous job / safety threatened / etc)
- suitability requirements (health, criminal record, community reputation)
Generally, the amount of discretion that states have on whether they must issue a permit varies widely.
Training Requirements
Training requirements for concealed carry permits vary significantly as well. Some states require specific courses that need be taken, such as safe storage, specific laws, or specific use cases for guns. Some states allow online courses.
A notable data point: of the 31 states that require training courses for concealed carry of a firearm, only 18 of them require actually firing a gun. In some cases, that just means “you’ve fired a gun on a firing range”, while others indicate some level of proficiency, such as target accuracy.
Yet, while it is good that 31 states have training requirements, none of those 31 require the applicant to demonstrate competency in decision-making with regards to firearms, such as knowing when it is lawful or justified to use a concealed firearm.
“Right to Carry” Laws
Over the last forty years, there has been a significant shift in the “Right to Carry” law landscape in the states.
Concealed Carry Laws in 1980
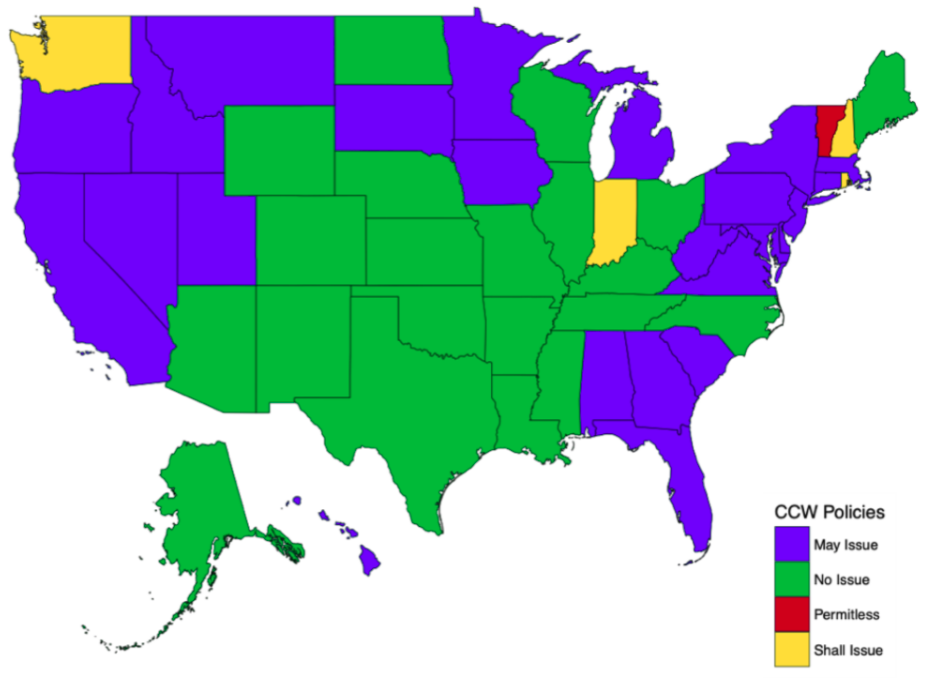
In 1980, the majority of states were “no issue” law states – carrying a concealed firearm was not allowed at all. Many more states were “may issue” states (with strict restrictions), with three “shall issue” states. Only one state did not require any extra licensing or permit to carry a concealed firearm in most public spaces – Vermont.
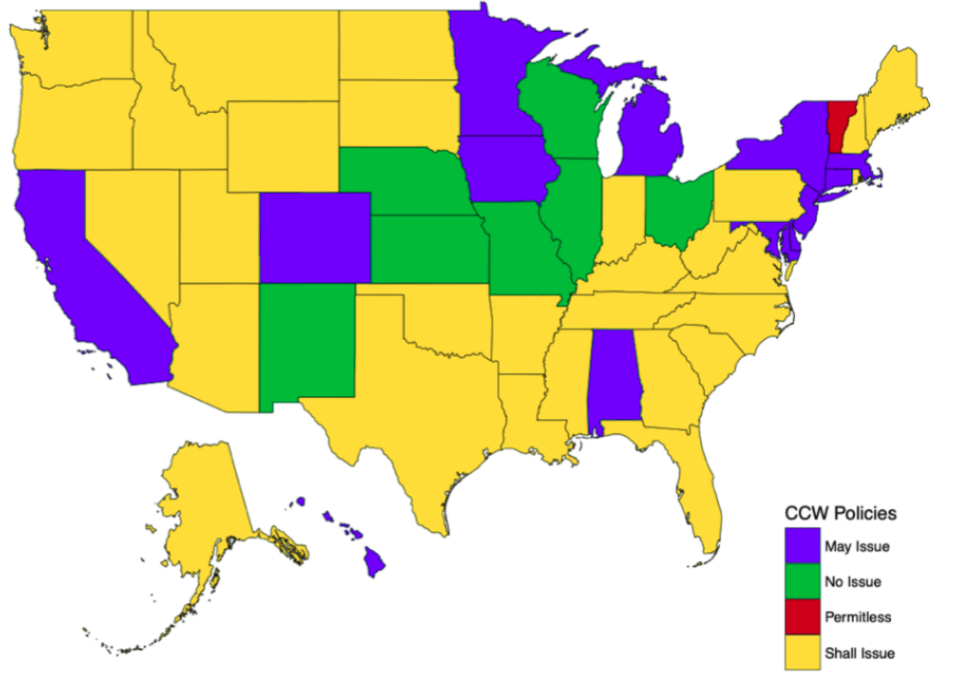
Concealed Carry Laws in 1990
Fast forward ten years to 1990:
- More states became “shall issue” states, making it relatively easy for individuals who can legally own guns in their home to legally carry them in public and in a vehicle.
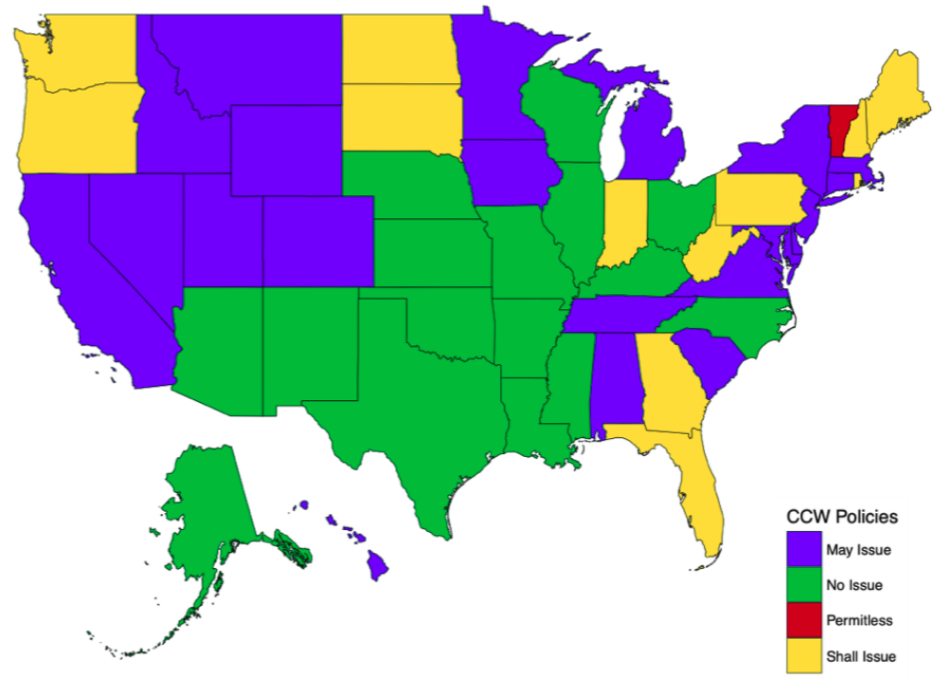
Concealed Carry Laws in 2000
Fast forward another ten years to 2000:
- More dramatic changes, with “shall issue” laws becoming the dominant laws across the states
- Few states with “may issue” laws
- Very few states with “no issue” laws
Concealed Carry Laws in 2010
Fast forward another ten years to 2010:
- Almost all states are “shall issue” states
- Alaska joins Vermont in being the second state requiring no permit or extra licensing to carry a concealed firearm in public spaces
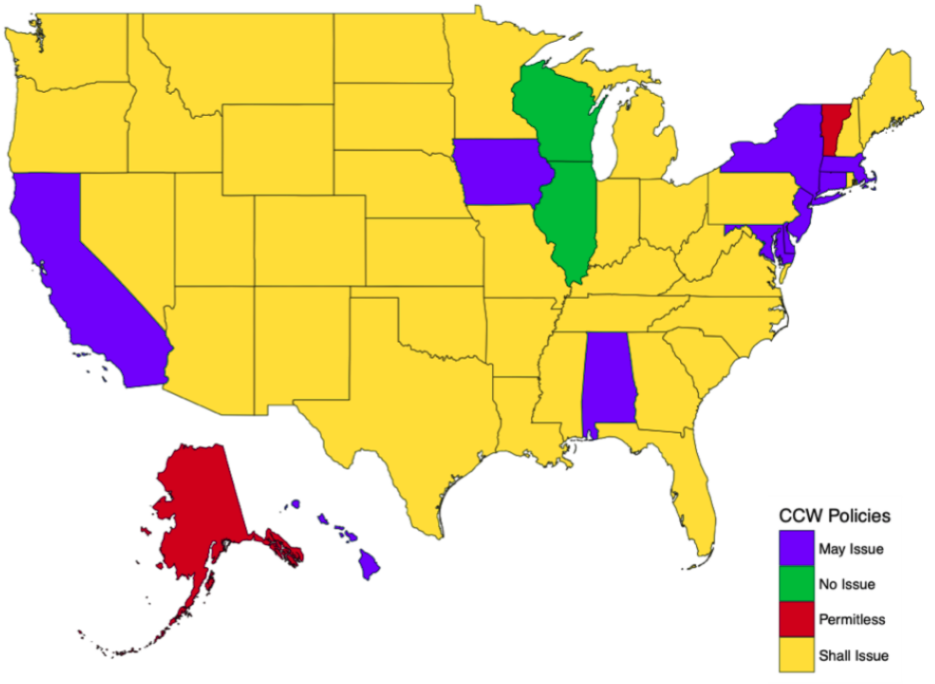
Concealed Carry Laws in 2017
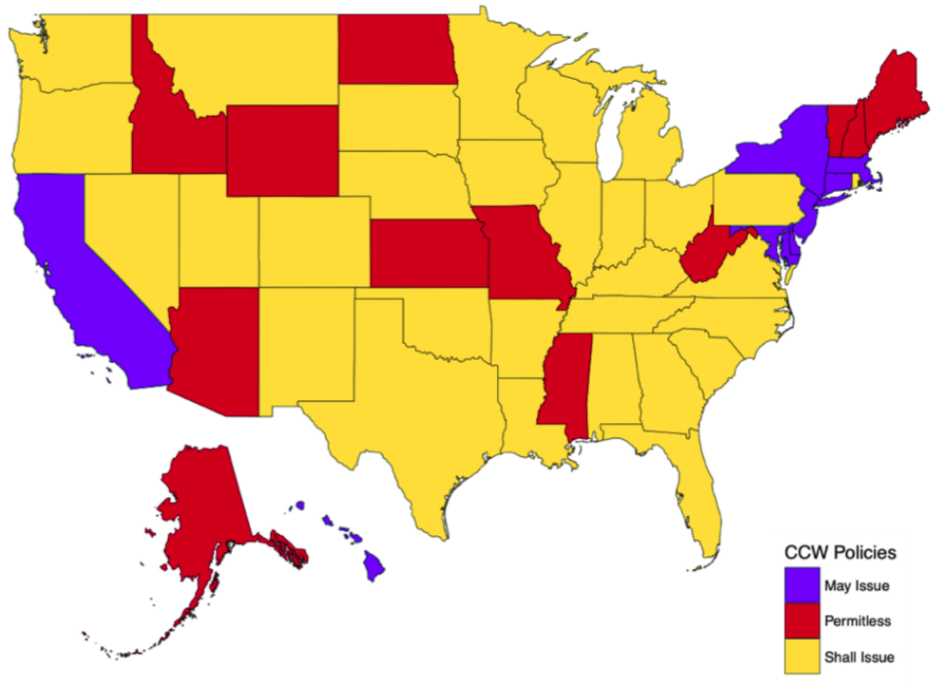
Fast forward seven years to 2017:
- Most states are “shall issue” states
- Twelve states require no permitting or extra licensing for carrying a concealed firearm in public
- Only eight states are restrictive “may issue” states
- No states prohibit concealed carry of firearms entirely
With all of this change, we can look at research on how this has affected society overall.
One of the first early research results showed, in 1998, that more people were carrying concealed guns as a result of these laws. The researchers theorized that this would deter and prevent crimes, and it presented evidence that this was the case. Unfortunately, the data and results were closely scrutinized and were found to have major data and research errors, invalidating the conclusions of this first study (sources: Crime and Deterrence, Firearms and Violence, Impact of Right to Carry)
Newer research, since that time, has uncovered a variety of effects about the rise of “right to carry” laws (source: Right to Carry Laws), primarily:
- Arming citizens in public does have benefits
- Some harm, violence, and crime is deterred
- Benefits are outweighed by the risks, however
- More harms, violence, and crime is actually created than is reduced
Why might this be the case? “Right to Carry” laws enable more guns to be available in public, both on a person and in vehicles for criminals to steal. Criminals might also suspect that in the course of committing crimes, they will have a higher chance of encountering an armed civilian, and so they themselves carry more guns during their criminal activities. Sometimes, these findings are directly connected to a rise in general fear in society that other people might be carrying guns, so individuals think the best thing to do is to carry a gun themselves. This leads to an “arms race” of civilians carrying guns in public.
Percent increase in violent crime every year after a “Right to Carry” law is in effect (source: Right to Carry Laws)
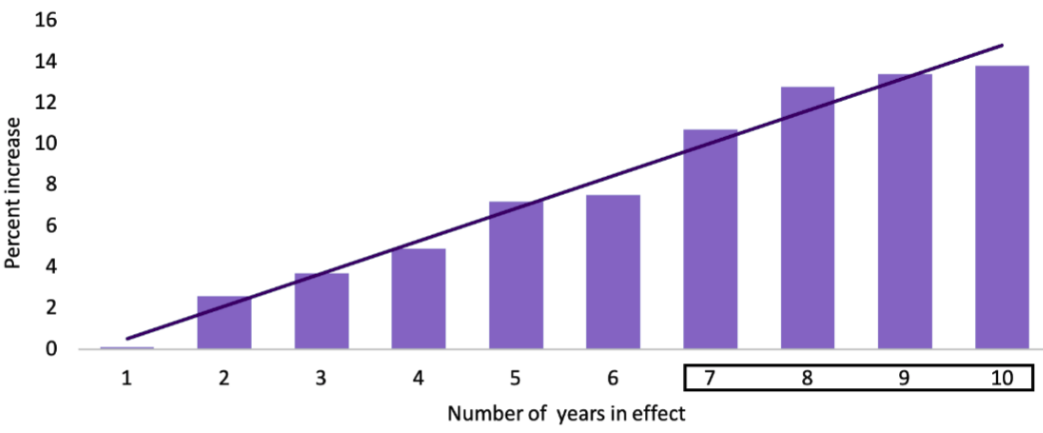
A 2018 study looked at how “right to carry” laws are likely to have impacted violent crime rates over time, and found a clear link between the number of years that a “right to carry” law was in place and the percent increase in violent crime. After seven years, the increase in violent crime was statistically significant (essentially unmistakable), with an increase in 11 – 14% overall.
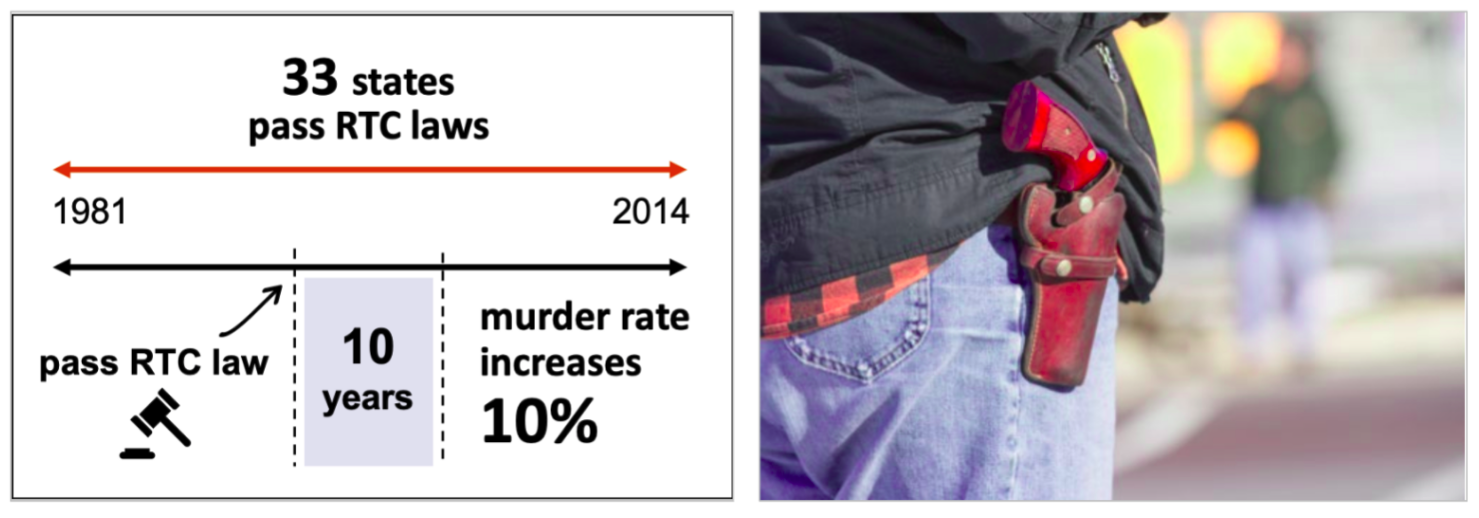
Also revealed in that study time period, in which 33 states passed “right to carry laws”,
- the murder rates were estimated to have increased by 10% during the ten year period after such laws went into effect
Two other studies in 2017 and 2018 looked at how “right to carry” laws impacted homicide rates, looking at states with “shall issue” laws. Those studies found (sources: Easiness of Legal Access, Homicide in Urban Counties):
- “right to carry” laws were associated with a 6.5% increase in overall homicide rates between 1991 and 2015
- “right to carry” laws were associated with a 7% increase in firearm homicide rates
Change in Firearm Homicide in Missouri vs US, 2016-2017 (source: CDC WISQARS)
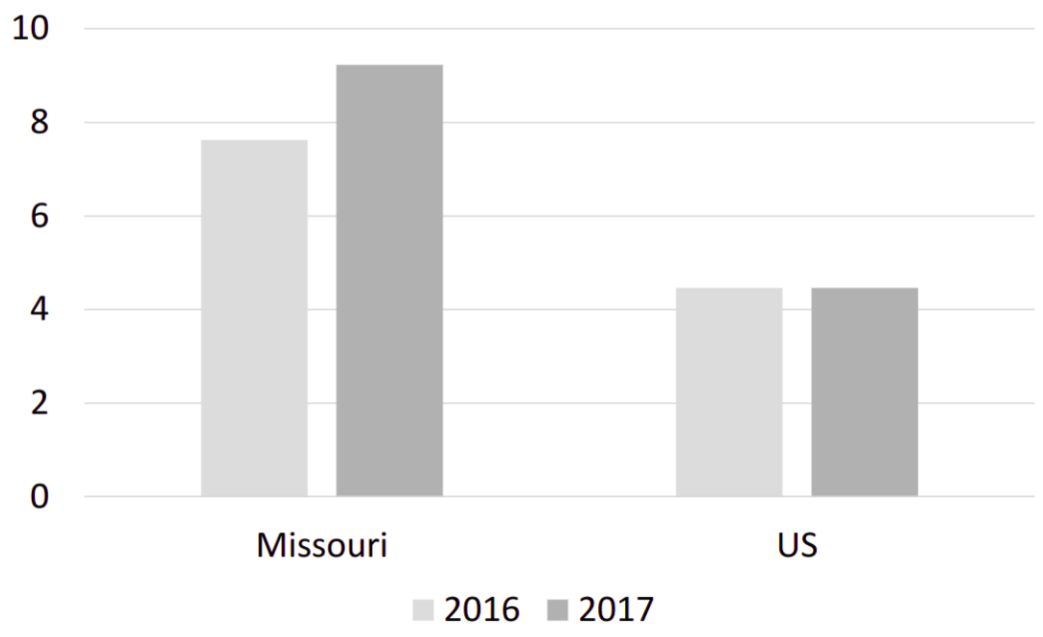
A final case study on “right to carry” laws: Missouri has greatly loosened restrictions on concealed carry of firearms over the last few decades. In 2017, it became a permitless concealed carry state. One year of firearm homicide data is available since it became a permitless state, and it clearly shows that rates increased from seven to nine homicides per 100,000 during that period, while rates stayed completely flat for the US overall.
“Stand your Ground” Laws
“Stand your Ground” laws define when it is legally justifiable to use lethal force, often referring to what is called the Castle Doctrine. While I’ll cover these laws in more detail later, in short, they say that when you’re faced with a dangerous situation, you are not legally obligated to retreat, and may use lethal force to defend yourself. The intent of these laws is to deter crime, under the hypothesis that if a potential burglar, robber, or assailant knows that a victim may defend themselves with lethal force, they may choose not to commit that crime.
“Stand your Ground” laws were first enacted by Utah in 1994, followed by Florida in 2005, and by 2018, 33 states had “Stand your Ground” laws. Some of the first studies of the effects of these laws include (sources: Evidence from Castle Doctrine, Homicide in Urban Counties, Unlawful Homicides in Florida):
- burglary, robbery, and violent assault rates did not go up or down by the passing of these laws. So hypothesis that crime would be deterred was disproven.
- homicides went up by 7 – 9% in large urban counties between 1994 and 2014
- very specifically, an increase in justifiable homicides in addition to non-justifable homicides
- homicides in Florida went by up an incredible 24% overall, including a 32% increase in firearm homicide, between 2005 and 2014
In short, the laws did not have the effect that they intended, and actually increased the rate of homicide.
The fact that concealed carry of firearms is now more accepted than it ever was before makes it important to keep these statistics in mind. As more people carry guns in public and have a legal justification for using their guns to defend themselves rather than trying to run away, it’s no surprise that the number of firearm homicides is up. In particular, in Florida, there were three times as many concealed carry permit holders in Florida in 2015 as there were in 2005 when the “Stand your Ground” law was first enacted (source: Evidence from Castle Doctrine).
One of the most famous highlights of “Stand your Ground” laws appeared in the slaying of Trayvon Martin, an unarmed 17-year old, in Florida. There is a substantial amount of research to show that there are implicit biases that are pervasive in the United States with regard to black individuals, especially black males. The implications of an ever-growing gun-carrying public may very well have serious implications on opportunities to act on racial bias in a lethal way.
Conclusions
Civilian Gun Carrying
- “Open Carry” is the visible carrying of a gun in public
- “Concealed Carry” is the non-visible carry of a gun in public. All states have allow concealed carry in some form.
- Three types of concealed carry laws exist at the state level:
- “May issue” (used by 8 states) – laws that have requirements and discretion over whether to allow an individual to carry a concealed firearm
- “Shall issue” (used by 29 states) – laws that have requirements but no discretion if those requirements are met
- “Permitless” (used by 13 states) – laws that do not require permits to carry a concealed firearm
- Requirements and discretion vary, including permit duration, residency and age requirements, suitability requirements, criminal record, etc
- Training requirements (31 states require this) also vary
- No training requirements require proof of understanding the legal uses of the firearm or proof of good judgment
“Right to Carry” laws
- “Right to Carry” laws embody that if requirements are met, the state must permit or allow concealed carry by a licensed individual
- Dramatic shift away from “No licensing” to “Shall issue” laws nationwide since 1980
- 1980: Five “Right to Carry” states (four “Shall issue” and one “Permitless”)
- 2017: 41 “Right to Carry” states (29 “Shall issue” and 13 “Permitless”
- “Right to Carry” laws have more negative effects that positive ones
- 11 – 14% increase in violent crime after seven years of having a “Right to Carry” law vs not having one
- 6 – 7% increase in homicide rates over a 25 year period
“Stand your Ground” laws
- “Stand your Ground” laws define when it is legally justifiable to use lethal force against rather than retreat from danger
- These laws do not decrease burglary, theft, or violent crime as they had intended
- They increase homicide rates by 7 – 9% in large urban areas over a 20 year period
- Over 20 years, Florida’s “Stand your Ground” law:
- increased the overall homicide rate by 24%
- increased the firearm homicide rate by 32%
References
- Crime and Deterrence – a flawed 1998 study claiming that concealed carry laws deter violence crime
- Firearms and Violence – a 2005 book which identified research and result errors in the Crime and Deterrence study above
- Impact of Right to Carry – a 2014 study continuing to examine and further refute the conclusions from the Crime and Deterrence study above
- Easiness of Legal Access – a 2017 study examining the relationship between “shall issue” laws, “may issue” laws, and homicide rates
- Homicide in Urban Counties – a 2018 study evaluating the effects of firearm laws on homicide in large, urban counties
- Right to Carry Laws – a 2018 study estimating the impact that adopting Right to Carry laws have on violent crime
- CDC WISQARS – a public database that provides fatal and nonfatal injury, violent death, and cost of injury data.
- Evidence from Castle Doctrine – a 2012 study examining whether aiding self-defense via standing one’s ground deters crime or, alternatively, increases homicide
- Homicide in Urban Counties – a 2018 study testing the effects of firearm laws on homicide in large, urban U.S. counties
- Unlawful Homicides in Florida – a 2017 study examing the association between the enactment of a “Stand your Ground” self-defense laws and Florida homicides